Source de cette page: http://yves.maguer.free.fr/home/CVT_fort_couple.html
Mise à jour le: 03/06/2013
Mon contact / my contact:

Here
is an explanation of CVT technologies comparing to mine.
Transmission
à variation continue sans adhérence. Transmission continûment variable
sans friction. Transmission continuement variable sans frottement.
Transmission sans courroie. Transmission de puissance mécanique.
Transmission variable de couple. Asservissement de couple. Asservissement
de vitesse. Augmenter couple moteur électrique. Transmission à variation continue. Transmission par obstacle.
Nouveau
principe CVT. Nouveau type de variateur mécanique. Innovation CVT.
Boîte de vitesses à variation continue. Transmission à rapport variable.
I show the operation, there
are 10 drawings.
Je montre le fonctionnement,
il y a 10 figures.


J'ai inventé un variateur mécanique de vitesse, linéaire,
sans adhérence, ni frottement, ni chaîne, ni déformation.
Le couple n'est transmis que par appui.
Pas de limite de puissance (comme un
engrenage).
Le rapport de transmission peut aller de 1 à 10.
Variation pleine gamme instantanée,
même à l’arrêt. (video 5méga)(youtube)
No power limit (like a gear).
The transmission ratio can range from
1 to 10.
Instant full range variation, even at
stop. (video 5méga)(youtube)
Le marché concerne:
- les moteurs électriques (asynchrones en
particulier),
- les alternateurs,
- les trains,
- l'éolien,
- l'hydraulien,
- l'agricole (tracteurs)*,
- les engins de chantier*,
- tous les véhicules terrestres*,
- l'automobile (hybride aussi)*,
- les vélos,
- les motos,
- les machines outils,
- toutes les utilisations d'une manivelle,
- etc, tout ce qui tourne et qui fait plus d'un tour.
How it works? / Comment il marche?
fig 1: le principe / the principle

La distance "d" est proportionnelle au rapport de tranmission.
The distance "d" is proportional to the transmission ratio.
fig 2: zone lointaine / far zone

Le rapport de transmission est limité à 1:2.
The ratio range is limited to 1:2.
fig 3: zone proche / near zone

Le rapport de transmission est distance entre A et Px divisé par
distance entre B et Px.
Ce rapport peut aller à 1:10.
The transmission ratio is distance between A and Px divided by distance
between B and Px.
This ratio can range to 1:10.
fig 4: principe 2D / 2D principle

Le dessin correspond à zone lointaine.
The drawing correspond to "far" zone.
En zone lointaine:
La vitesse V1 égale V2. V3 < V1. Le pignon correspondant à V1 doit
être le seul à entrainer la couronne d'axe A, sur 120°.
With far zone:
Speed V1 equal V2. V3 <V1. The pinion corresponding to V1
should be the one to cause the crown rotation (with A axis), on a 120°
portion.
En zone proche:
La couronne entraine le pignon correspondant à V3 sur 120°.
With near zone:
The crown gear drives the pinion corresponding to V3 over 120 °.
Problème: quand B se rapproche de la couronne, les pignons se cognent
les uns contre les autres.
Problem: when B is close to the crown gears, pinions bump against each
other.
fig 5: choix de zone / zone choosing

Le choix peut se faire avec une roue-libre.
The choice can be made with a freewheel.
Si on utilise 6 bras au lieu de 3, les variations de vitesse sur un
tour (a-cyclismes) sont beaucoup plus faibles:
If you use six arms instead of 3, the speed variations on a round
(acyclisms) are much lower:

Voici une simulation en CAO du prototype.
Video youtube CAD simulation of prototype
fig 6: principe 3D / 3D principle
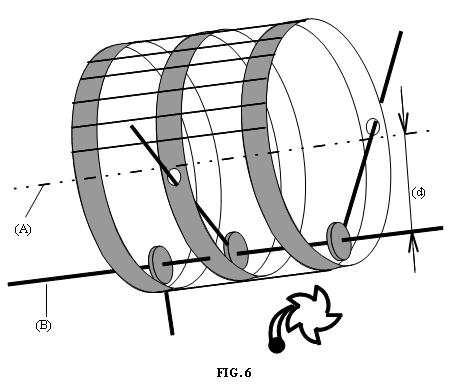
Pour diminuer les a-cyclismes (problème d'homocinétisme), on peut
ajouter autant de bras qu'on veut.
To reduce a-cyclisms (homokinetic problems), you can add as many arms
you want.
Le problème de la fig. 4 (homocinétique + les
pignons se cognent les uns contre les autres) est
résolu.
The problem of drawing
4 (homokinetic + pinions
bump against each other) is solved.
Avec des roues-libres, l'entrainement "lointain" est obtenu en applicant le couple sur (B).
Le pignon le plus rapide entraine (A).
With freewheels, "FAR" zone is obtained when torque is applied to (B).
The fastest pinion will make (A) moving.
Avec des roues-libres, l'entrainement "proche" est obtenu en applicant le couple sur (A).
(A) entrainera le pignon qui donne la plus grande vitesse à (B). Celui de gauche sur la figure 6.
With freewheels, "NEAR" zone is obtained when torque is applied to (A).
(A) will make moving the pinion which gives the highest speed to (B). The left one in the drawing 6.
fig 7: écarteur / spacer

Mais ce pourrait être une cardan.
But it could be a gimbals.
video en simulation CAO.
CAD simulation.
fig 8: machine 2D / 2D machine

C'est le schéma de mon prototype. Un seul chariot est représenté.
This is the drawing of my prototype. Only one piece (2) is shown.
On change le rapport de transmission en actionnant la pièce (14).
We change the transmission ratio by actuating part (14).
Vidéo de l'intérieur du prototype.
Video inside the prototype.
Les tests du prototype (zone lointaine)
The protype tests (FAR zone)
fig 9: machine 3D / 3D machine

La machine est montrée avec le rapport de transmission un (A et B sont
coaxiaux).
The machine is shown with the transmission ratio 1:1 (A and B are
coaxials).
Si le couple résistant pousse la pièce (14) dans le sens de la flèche,
vous pouvez faire un asservissement en
couple en mettant un simple ressort qui retient la pièce (14).
If the load torque pushes the piece (14) in the direction of the arrow,
you can want to make a servo torque
by setting a simple spring which holds the piece (14).
Selon mes calculs, avec un écartement de 85% et 18 bras (donc le couple est passé sur 360°/18 bras = 20°), on a
un rapport de transmission de 5,38 et +/- 5° d'acyclismes.
According to my calculations with a spacing of 85% and 18 arms we have
a gear ratio of 5.38 and +/- 5° acyclic (360°/18 arms= 20° with torque).
La figure ci-dessous représente un tour:
The figure below shows a round:

fig 10: détail contact / contact details

La pièce (12) peut contenir un amortisseur.
Part (12) can contain a shock absorber.
_________________________________________________________________________________________
04/03/2013:
J'ai trouvé 2 problèmes sur la machine de la figure 9 (limitation de couple et acyclismes) que j'ai résolus dans ma tête.
Il me reste à dessiner la solution sur papier et en CAO puis en maquette et par un autre brevet.
I
found two problems with the machine of Figure 9 (a torque limit problem
and a constant speed output problem) that I resolved in my head.
It remains to draw the solution on paper and CAD model and then by another patent.
11/04/2013:
Ma solution contre les acyclismes ne dépend pas du couple. Ma solution ne contient PAS DE RESSORT.
My solution against the acyclism not dependent on torque. My solution does NOT CONTAINS ANY SPRING.
_________________________________________________________________________________________
Le brevet est déposé depuis le 16/01/2013:
J'ai réalisé un prototype. rapport 1 à 1.7 ou 1 à 2.4, modifiable
aussi à
l'arrêt,
sens de transmission du couple, unique.
Couple compatible avec l'automobile (prototype
testé à 270N.m).
Ceci correspond à mon poids (90Kg) sur la manivelle (0,3m de rayon).
Par calcul, le couple maximal est de 1023N.m,
en sélectionnant le rapport de transmisssion 1:1.
Si je multiplie la taille des pièces par 2.3, le couple
maximal passe à 9100N.m.
Je l'ai fait tourner à 1000tr/min à vide, avec une perceuse (650watts).
Une vidéo montre les rapports de transmission,
le couple et la vitesse:
rapport,
couple et vitesse.
(sur la vidéo il n'y a que la moitié de
mon poids comme couple moteur, donc 900N x 0.13m / 2 = 58N.m)
(les vibrations sont dues au balourd apporté par les manivelles).
Lien
youtube.
Une video du test du
prototype à 270N.m.
Je réponds à toutes sortes de questions, sur ce fil
de discussion.
Le couple en sortie de variateur se retrouve sur l'organe de commande.
On peut donc augmenter automatiquement le couple en sortie du
variateur,
lorsque le couple résistant augmente, avec un simple ressort
(asservissement en couple).
Pas d'antériorité INPI dans les classifications F16H3/44, F16H3/52,
F16H49/00 de http://fr.espacenet.com, ni sur le net.
Faites moi des propositions pour déposer à l'international.
*
Remarque (sans brevet, lol, je l'écris ici le 30/01/2013, donc ça passe
dans le domaine public):
Pour les véhicules terrestres sur sol glissant,
le différentiel a un défaut; si une roue perd l'adhérence, l'autre perd
le couple.
Contre ça, il y a le crabot; mais le véhicule dans ce cas va tout
droit!!
Le différentiel autobloquant viscocoupleur a un temps de réaction
sensible et une transmission incomplète de la puissance.
Le
différentiel autobloquant Torsen est un dispositif mécanique complexe
utilisant de nombreux engrenages et vis sans fin, et il autorise de
faibles différences de rotation entre deux roues. Il y a aussi le
X-drive de BMW (micro-embrayage), compliqué donc cher.
Donc avec un variateur simple, sur chaque roue motrice et
leurs rapports de transmission commandés par le volant,
vous obtenez un véhicule qui tourne sur sol glissant (CQFB, ce qu'il
fallait breveter).
Idem sur un char...
##########################################################
##########################################################
I have invented a mechanical drive speed, linear,
without adherence, nor friction, nor chain.
The torque is transmitted by abutment pieces.
(transmission without friction)(continuously variable transmission
without friction)
(CVT without friction)(positive continuously variable
transmission)(transmission without belt)
(transmission high torque)(power mechanical transmission)(variable torque mechanical transmission)(frictionless transmission)
(mechanical
drive speed)(new CVT principle)(new type of mechanical drive)(CVT
innovation)(cvt with no friction components)(positive CVT)
The transmission ratio can range from
1 to 10.
I realized a prototype.
The gear (or reduction) ratio is 2.4 to 1.
The ratio is editable also at the shutdown.
There is only one direction of torque transmission.
The torque allow using my invention for cars (270Nm for my prototype).
Look at the demonstrating
video at 58N.m.
And a test at 270N.m
The transmitted torque can be found on regulator's linear command in
translation.
I do not have the means to buy a patent which protect me enough.
My invention is not present in INPI classifications: F16H3/44
F16H3/52,
F16H49/00 (http://fr.espacenet.com), nor on the net.
I have a french patent what do you suggest to me?
##########################################################
##########################################################
Avantages et inconvénients par rapport aux autres
variateurs:
Inconvénients du prototype:
- Sens de transmission unique (pas de frein moteur
pour une voiture),
Avantages:
- rapport de transmission largement suffisant pour
l'automobile (peut aller à 10:1).
- pas de frottement donc pas
d'usure,
- fort couple, en augmentant la taille
des
pièces on augmente le couple (je n'ai pas testé la limite de mon
prototype, vous comprenez..) La limite est la rupture, pas la perte
d'adhérence,
- pas d'usure par rapport au système de courroie
métallique (je considère qu'il y a usure lorsqu'une dent de la courroie
cherche une rainure dans ce système: (CVT wikipédia (courroie métallique) ) et qu'il y
a usure (ou vieillissement) lorsque la chaine se plie et se déplie.
- supporte bien la vitesse, celle-ci induit
seulement des efforts supplémentaires sur des roulements,
- le rendement devrait être très bon. Donc
comparable à celui d'un engrenage,
- fiabilité, puisque le principe est simple et qu'il
y a peu de pièces mécaniques,
- changement de rapport de transmission (pleine
gamme) instantané,
- pas de frottement, pas d'échauffement, pas de
besoin de refroidissement, donc pas d'huile,
- strictement aucun glissement,
- pas d'électronique ou d'informatique, donc fiable,
- pas de problèmes en conditions extrèmes
(température, vibrations, etc...),
- pas de réglage, pas de calibration, pas de
maintenance.
Notez bien:
La logique de commande transforme l'ordre du conducteur sur la pédale
d'accélérateur (Consigne Conducteur (CC)) en 2 ordres:
- les gazs (ou la tension électrique
pour un véhicule électrique)
- le rapport de transmission (RT).
Cette logique de commande joue un rôle essentiel dans la sensation
donnée au conducteur.
Pour moi, cette logique devrait être:
la CC commande les gazs comme si le moteur était à vide.
Pour cela la consigne sur le RT est régulée de telle sorte que le
moteur puisse prendre les tours comme s'il était à vide (conduite
sportive, dépassement).
La conduite écologique est obtenue en appuyant peu sur la CC.
La CC devient une commande de puissance et non une commande de
tours/min.
Donc, j'appuie peu, j'accélère le véhicule avec un "petit" moteur,
j'appuie beaucoup, j'accélère avec un "gros moteur".
Votre moteur devient nerveux! (c'est comme si on tombait un rapport
sans débrayer).
Comparez le temps pour passer de 1000tr/mn à 4000tr/mn entre la
position point mort et lorsque vous êtes sur la route!!!
Ya pas photo! Les CVT à courroie ont une inertie monstrueuse, c'est
pour ça que les gens n'en veulent pas!
C'est à la limite dangereux pour doubler, si la puissance ne vient pas
quand on la demande.
Mon invention ne concerne pas la logique de commande.
Me contacter:
tel: France 0 (33)6 181
606 76
mail:
yves point maguer arondbasse free point fr
##########################################################
##########################################################
Google translation:
Advantages and
disadvantages compared to other CVT:
Disadvantages of the
prototype:
- Sense of single
transmission (no engine brake for a car),
Advantages:
- Sufficient gear for
automobile (ratio 1:10).
- No friction,
therefore no wear
- High torque,
increasing the size of the parts is increased torque (I have not tested
the limit of my prototype, you know ..) The limit is the breakdown, not
the loss of adhesion,
- No wear compared to
metal belt system (I think it is when a tooth wear of the belt is
seeking a slot in this system (CVT wikipedia (metal belt)) and there is wear (or aging) when the chain
folds and unfolds.
- Tolerates speed, it
only induces more effort on bearings,
- Performance should be
very good. Thus comparable to that
of a gear
- Reliability, since
the principle is simple and there are few mechanical parts,
- Change of
transmission ratio (full range) without
waiting,
- No friction, no
heating, no cooling needed, so no oil,
- Absolutely no
slipping
- No electronic or
computer, so reliable,
- No problems in
extreme conditions (temperature, vibration, etc. ...),
- No adjustment, no
calibration, no maintenance.
Note:
The control logic turns
around the driver on the accelerator pedal (Luggage Driver (CC)) in 2
types:
- The gazs (or voltage
for an electric vehicle)
- The transmission
ratio (TR).
The control logic plays
a key role in the sensation given to the driver.
For me, this logic
should be:
CC gazs the command as
if the engine was empty.
For this, the deposit
on the RT is controlled so that the engine can take turns as if it was
empty (sporty driving, overtaking).
Eco-driving is obtained
by pressing slightly on the CC.
The CC is a power
control and not control rpm.
So, I support small, I
accelerate the car with a "small" engine, I agree very much, I
accelerate with a "big engine".
My invention does not
concern the control logic.
Contact me:
tel: France 0 (33)6 181
606 76
mail: yves point Maguer
arondbasse free dot fr
##########################################################
##########################################################
Readers since 26 Feb 2013: 
Ou sont mes lecteurs:
